
|
文檔名稱: |
CC310 硬件設計手冊 |
|
版本: |
1.00 |
|
日期: |
2014-06-08 |
|
狀態: |
發布 |
|
文檔控制號: |
CC310_硬件設計手冊_V1.00 |
前言
感謝使用OBDIICLOUD 提供的CC310 MINIOBD模塊。本產品具有CYW命令接口,可以提供OBD數據采集、汽車車身狀態獲取等業務。使用前請仔細閱讀用戶手冊,您將領略其完善的功能和簡潔的操作方法。
此模塊主要用于汽車OBD數據采集以及汽車故障診斷,本公司不承擔由于用戶不正常操作造成的財產損失或者人身傷害責任。請用戶按照手冊中的技術規格和參考設計開發相應的產品。同時注意使用車載電子產品應該關注的一般安全事項。
在未聲明之前,本公司有權根據技術發展的需要對本手冊內容進行修改。
目錄
1. 緒論
2. 模塊綜述
2.1. 模塊主要特性
2.2. 工作模式
2.3. 模塊功能框圖
3. 模塊封裝
3.1. 引腳分布圖
3.2. 模塊引腳描述
3.3. 機械尺寸
4. 接口應用
4.1. 供電
4.2 功能模式
4.3 串口
4.4 SPI接口
4.5 CAN線接口
4.6. K線接口
4.7.復位及喚醒
4.8 LED接口
5. PCB布局
5.1 模塊PIN分布
5.2 PCB布局原則
5.2.1 電源
5.2.2 OBD總線
5.3 推薦PCB布局
6. 電氣,可靠性和汽車電器特性
6.1 絕對最大值
6.2 工作溫度
6.3 數字接口特性
6.4 OBD接口特性
6.5 耗流(VBAT=12V)
6.6 靜電防護
7. 生產
7.1. 模塊的頂視圖和底視圖
7.2. 推薦焊接爐溫曲線圖
版本歷史
|
日期 |
版本 |
變更描述
|
作者 |
|
2014-06-08 |
1.00 |
初版 |
Strong |
|
2019-05-09 |
1.10 |
修正幾處文字描述 |
Strong |
|
|
|
|
|
1. 緒論
本文檔描述了模塊的硬件應用接口,包括相關應用場合的電路連接以及OBD接口等。可以幫助用戶快速的了解模塊的接口定義、電氣性能和結構尺寸的詳細信息。結合本文檔和其他的應用文檔,用戶可以快速的使用模塊來設計OBD車載應用方案。
2. 模塊綜述
CC310模塊可支持但不限于以下標準OBDII汽車通訊協議:
ISO14230
ISO15765
模塊的尺寸只有26*16*3 mm,可以滿足大部分用戶應用中對空間尺寸的要求。模塊和用戶的物理接口為12PIN的郵票孔焊盤封裝,提供了模塊的所有硬件接口。
CC310模塊用于與汽車診斷通訊,硬件支持一路CAN線和及一路KLine物理層,可跟現在的極大部分汽車的各種控制模塊進行診斷通訊。
模塊將汽車總線各種協議的數據轉換為UART 格式的數據進行發送和接收,戶可直接與各種單片機、PC 串口,PAD 等設備與汽車相連接。能快速的實現產品的二次開發。
支持大部分汽車OBD及專有的診斷應用。
內置固化升級程序,可實現無限功能升級。l
CC310模塊性能穩定。 采用省電技術設計,在休眠模式下耗電流低至1mA。
2.1. 模塊主要特性
|
特性 |
說明 |
|
供電 |
電壓范圍:4.75V ~5.25V |
|
省電 |
SLEEP模式下的耗流為1毫安 ( 供電5V,汽車電池電壓12.7V ) |
|
物理接口 |
|
|
支持協議 |
標準OBDII排放檢測,私有協議覆蓋大部分主流汽車 |
|
數據應用 |
精確里程、油耗統計、駕駛行為分析、防盜狀態獲取 |
|
用戶接口 |
? 可以通過USART發送CYW命令和數據 ? 車輛點火提醒輸出端口 |
|
溫度范圍 |
? 工作溫度:-40℃ ~ +85℃ ? 存儲溫度:-45℃ ~ +90℃ |
|
用戶升級 |
可以使用PC升級軟件通過USART發送命令和數據升級 |
2.2. 工作模式
下表簡要介紹了CC310的多種工作模式。
|
模式 |
功能 |
|
|
正常工作模式 |
CAN總線通訊 |
模塊與汽車的CAN總線建立通訊,相互交換數據 |
|
K總線通訊 |
模塊與汽車的K總線建立通訊,相互交換數據 |
|
|
OBD總線監聽 |
模塊處于對汽車總線的數據監聽,不發送數據介入汽車通訊,不影響汽車總線通訊。 |
|
|
休眠模式 |
在不斷電的情況下,模塊根據汽車的運行狀態及發動機點火狀態,自動判斷進入休眠模式。汽車發動機熄火、門窗關閉、沒有振動及拖吊的情況下,模塊進入休眠模式。車輛點火會喚醒模塊,也可以使用WAKUP引腳喚醒模塊。 |
|
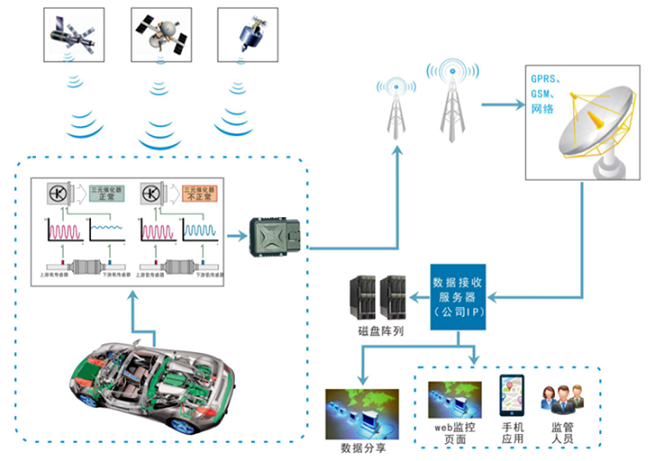
2.3. 模塊功能框圖
下圖列出了模塊的主要功能部分:
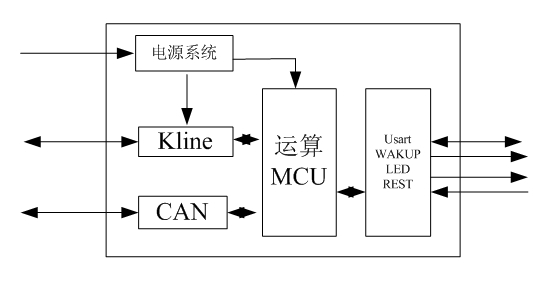
圖1: 模塊功能框圖
3. 模塊封裝
3.1. 引腳分布圖

3.2. 模塊引腳描述
|
引腳名稱 |
引腳序號 |
I/O |
描述 |
備注 |
|
供電 |
||||
|
12V |
1 |
I |
接汽車蓄電池電壓,不要經過任何處理,否則不能正確監測汽車點火狀態及蓄電池性能,Kline總線通訊需要使用此電壓 |
用于K線通訊及點火監測。 |
|
5V |
12 |
I |
模塊電源供電,電壓范圍,從4.75V到5.25V。電源要能夠提供200mA以上的電流。紋波<50mV。 |
|
|
GND |
6 |
I |
接地 |
|
|
USART數據接口 |
||||
|
TXD |
7 |
O |
模塊數據、命令發送 |
|
|
RXD |
8 |
I |
模塊數據、命令接收 |
|
|
CAN總線接口 |
||||
|
CANH |
5 |
I/O |
CAN總線差分信號高 |
|
|
CANL |
4 |
I/O |
CAN總線差分信號低 |
|
|
Kline總線接口 |
||||
|
K |
3 |
I/O |
K線通信信號 |
|
|
L |
2 |
I/O |
L線通信信號 |
|
|
用戶接口 |
||||
|
WAKUP |
10 |
I |
模塊喚醒信號輸入 |
如果不用,保持懸空。 |
|
SYSRET |
9 |
I |
通過拉低SYSRET并保持至少250mS然后釋放,可以重啟模塊。 |
|
|
LED |
11 |
O |
運行狀態指示燈 |
|
3.3. 機械尺寸圖
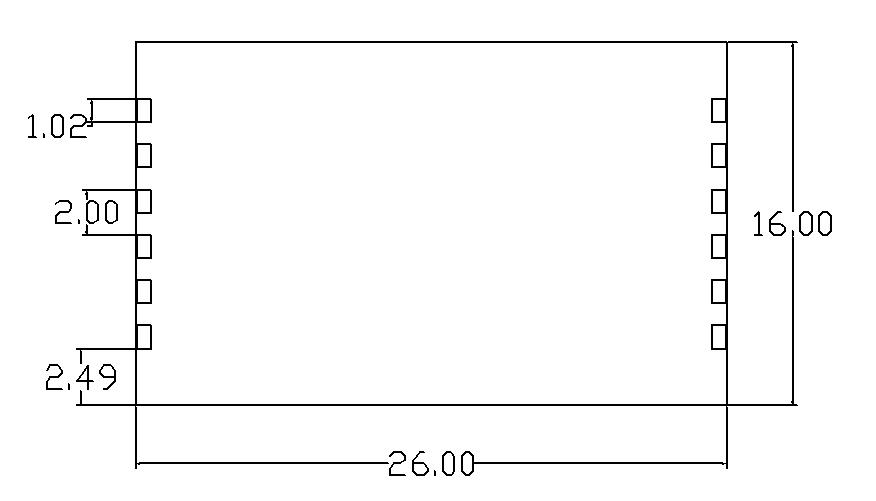
機械尺寸圖(單位mm)
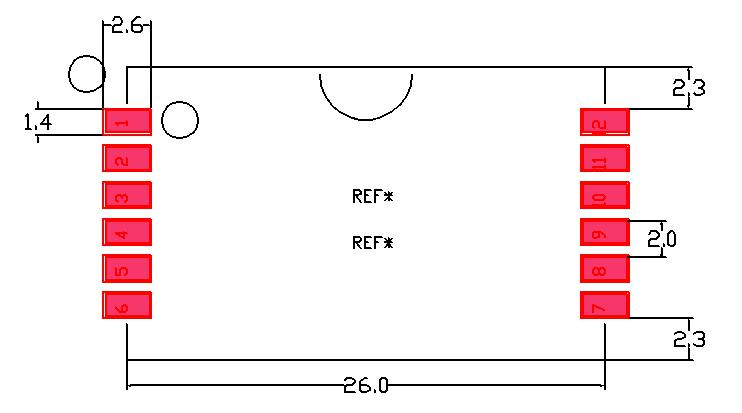
推薦PCB封裝(單位mm)
4. 接口應用
4.1. 供電
模塊5V的電壓輸入范圍是4.75V到5.25V,推薦電壓為5V。建議靠近5V輸入管腳處使用一個大電容穩壓,推薦使用47μF鉭電容(CA低 ESR)和一個1μF~10μF的陶瓷電容(CB)并聯。同時為防止浪涌對芯片的損壞,建議在模塊VBAT引腳使用一個6.3V/500mW的齊納二極管。 PCB布局時,電容和二極管應盡可能靠近模塊的5V引腳。注意:電路中的TVS要有良好的GND連接,位置要盡可能靠近接口,關斷電壓VRWM不能太高,一般是本身電壓基礎上增加1/3,如5V的信號線在選在TVS時,關斷電壓可以選擇6V左右的。
模塊12V的電壓輸入接入汽車的蓄電池,中間不要有容值或感值器件,不要經過任何處理,此模塊適用于12V及24V車載系統,最高電壓不能超過36V,否則會引起模塊損壞。
4.2 功能模式
4.2.1正常工作模式
汽車在啟動發動機時,模塊偵測到發動機點火信息,自動搜索汽車的通訊類型,與汽車ECU建立通訊,獲取汽車相關診斷數據、OBD數據流、故障碼、防盜狀態等,通過USART發送給主機。并根據獲取的數據,計算累積里程、瞬時油耗、耗油量等,接收主機查詢命令,報告主機想要獲得的數據。此模式模塊所有功能開啟,5V耗電電流30mA-50mA。12V耗電電流1mA。
4.2.2 休眠模式
模塊監測到發動機熄火后,會繼續監測汽車的防盜狀態,如果在設定的時間內汽車沒有正確設防,會給主機發送告警信息。在得到主機應答確認后,進入休眠模式,降低功耗。汽車熄火后正確設防,模塊進入休眠模式。休眠模式下,MCU關閉部分外設,檢測汽車總線上是否有數據,外部是否有振動,蓄電池電壓是否變化,來判斷是否喚醒模塊。也可以通過主機給模塊中斷信號來喚醒模塊。模塊在此功能模式下5V耗電電流1mA,12V耗電電流10uA。在休眠模式下,串口是不可用的。
4.3 串口
CC310提供一個用于通訊的標準串口。包含數據信號線 TXD 和RXD,串口支持的通訊波特率57600bps。串口配置為:8 位數據位,無奇偶校驗,1 位停止位,無數據流控。
4.4 CAN線接口
CAN總線分為高速和低速,高速CAN系統采用硬線是動力型,速度:500kbps,控制ECU、ABS等;低速CAN是舒適型,速度:125Kbps,主要控制儀表、防盜等。
模塊CANH接OBD接口第6腳,CANL接OBD接口第14腳,同時為防止浪涌對芯片的損壞,建議在模塊CANH、CANL引腳使用兩個6.3V/500mW的齊納二極管。
4.5. K線接口
K-Line及L-line接口對應于模塊的K、L引腳,用于實現ISO9141-2 、ISO14230 物理層,K引腳接OBD第7腳,L接OBD第15腳。同時為防止浪涌對芯片的損壞,建議在模塊K、L引腳使用兩個36V/1W的齊納二極管。
4.6.復位及喚醒
CC310模塊支持復位功能,用戶可以通過拉低模塊的SYSRET引腳250mS來快速重啟模塊,在正常工作狀態下,保持SYSRET復位引腳3.3V高電平或浮空。
當模塊處于休眠模式,可以通過以下的幾種方法喚醒模塊。
? 拉高外部WAKUP引腳中斷信號;
? 發動機點火;
WAKUP引腳被拉到高電平大概50mS后,串口會變有效。如不用到此功能,請保持低電平或者浮空。
CC310 提供一路LED 驅動接口電路,pin 定義為LED,用于指示模塊的工作狀態,管腳外部接LED燈正極,再串一個1K的限流電阻到地。
4.8 推薦應用電路

5. PCB布局原則
一款產品性能的好壞,很大程度上取決于PCB走線。前面我們已經介紹如果PCB布局不合理可能會引CAN總線及K總線干擾問題,解決這些干擾的途徑往往是重新Layout,如果前期我們能規劃一個良好的PCB布局,從而使PCB走線順暢,可以省下很多時間,當然也可以節省很多成本,本章主要介紹用戶在PCB布局階段應注意的一些事項,最大程度減少干擾問題,縮短用戶的研發周期。
電源走線不僅要考慮5V,也要考慮電源的回流GND。5V正極的走線一定要短,要粗,走線一定要先經過齊納二極管、大電容再到模塊的電源PIN。模塊GND腳用來連接電源的
一定要保證這個pin到電源的GND路徑最短,最通暢。這樣可以保證整個電源的電流路徑最短,干擾也可以最小。12V電源為汽車點火檢測用及K-Line通訊用,電流不大,但盡量使電流回路短。
OBD接口CAN總線為差分線,要根據差分線PCB走線原則來。確保信號同一時間出現在每條線路的同一點上。要使走線的各段等長。
6. 電氣,可靠性和汽車電器特性
6.1 絕對最大值
下表顯示了在非正常工作情況下絕對最大值的狀態。超過這些極限值將可能會導致模塊永久性損壞。
|
參數 |
最小值 |
典型值 |
最大值 |
單位 |
|
5V |
- |
- |
7.5 |
V |
|
12V |
- |
- |
36 |
V |
|
II* |
- |
- |
8 |
mA |
|
IO* |
- |
- |
8 |
mA |
*適用于SPI, USART, LED, SYSRET、WAKUP和ACC 等數字接口。
6.2 工作溫度
下表顯示了模塊的工作溫度范圍:
|
參數 |
最小值 |
典型值 |
最大值 |
單位 |
|
工作溫度 |
-40 |
+25 |
+85 |
℃ |
|
存儲溫度 |
-45 |
|
+90 |
℃ |
6.3 數字接口特性
|
參數 |
描述 |
最小值 |
典型值 |
最大值 |
單位 |
|
VIH |
輸入高電平電壓 |
2.8 |
- |
5 |
V |
|
VIL |
輸入低電平電壓 |
-0.3 |
- |
0.7 |
V |
|
VOH |
輸出高電平電壓 |
3.4 |
- |
- |
V |
|
VOL |
輸出低電平電壓 |
- |
- |
0.4 |
V |
*適用于SPI, USART, LED, SYSRET、WAKUP和ACC 等數字接口。
6.4 OBD接口特性
|
參數 |
描述 |
最小值 |
典型值 |
最大值 |
單位 |
|
CANH CANL |
CANH電平電壓 |
3 |
3.6 |
4.25 |
V |
|
CANL電平電壓 |
0.5 |
1.4 |
1.75 |
V |
|
|
K L |
輸出高電平電壓 |
9 |
- |
- |
V |
|
輸出低電平電壓 |
- |
- |
1.5 |
V |
6.5 耗流(VCC=5V)
|
參數 |
描述 |
條件 |
最小值 |
典型值 |
最大值 |
單位 |
|
5V |
電源電壓 |
電壓必須在最大值與最小值之間 |
4.75 |
5 |
5.25 |
V |
|
平均電流 |
工作模式 |
模塊全功能運行 |
20 |
25 |
35 |
mA |
|
休眠模式 |
模塊進入休眠模式 |
0.8 |
1 |
1.5 |
mA |
6.6 靜電防護
模塊沒有專門針對靜電放電做保護。因此,用戶在生產、裝配和操作模塊時必須注意靜電防護。ESD 性能參數(溫度:25℃,濕度:45%),模塊測試的性能參數如下表:
|
引腳 |
接觸放電 |
空氣放電 |
|
5V、12V |
±6KV |
±12KV |
|
GND |
±6KV |
±12KV |
|
TXD、RXD |
±2KV |
±8KV |
|
WAKUP、SYSRET、LED |
±2KV |
±8KV |
7. 生產
這一章描述生產相關的信息。
7.1. 模塊的頂視圖和底視圖
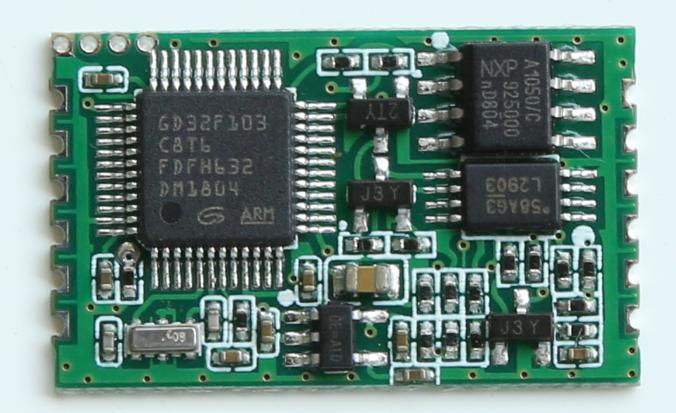
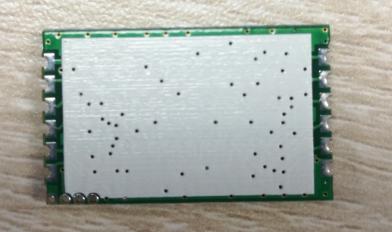
模塊頂視圖 模塊底視圖
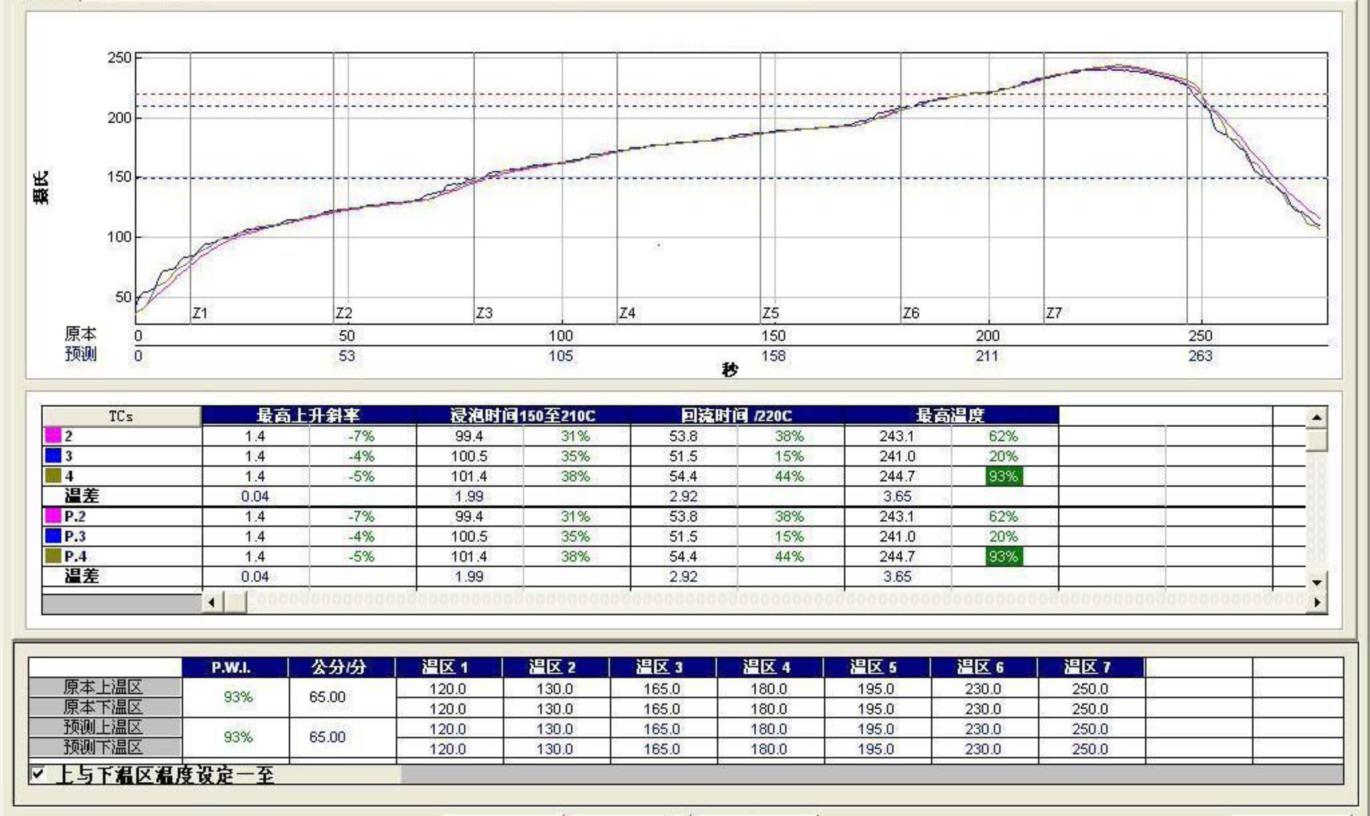
7.2. 推薦焊接爐溫曲線圖
掃一掃
 掃一掃
掃一掃