很多誤區會把企業和事業導到溝里去,所以凡是不想重蹈覆轍,或者尊重投資、市場、客戶的企業,都要認真對待以下這些常識錯誤。
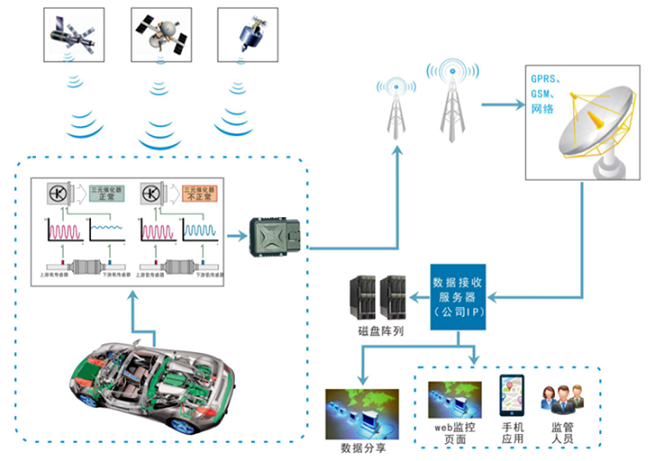
誤區1:車聯網就是移動互聯網。車聯網是實體互聯網,是一種重載型移動互聯網,軟硬件+平臺,O2O。傳統做信息型互聯網的,不適合做實體互聯網,一是兩個平面串接,二是規律不同。
誤區2:車聯網終端很簡單,就是OBD加數據卡。目前這種“腦殘式”的OBD終端,很快如同山寨手機一樣,銷聲匿跡了。
誤區3:OBD終端就是車聯網。這顯然是錯誤的,僅僅是一部分就不錯了,還需要云平臺,需要客戶端的豐富業務。
誤區4:車聯網與“RFID”。很多網站上和學者們還在大肆定義車聯網-RFID,這是閉著眼睛說瞎話。什么車聯網都與RFID不相關,ETC等也不是車聯網。RFID是電磁條碼,只是光學條碼的變異。
誤區5:藍牙也是車聯網。車聯網需要“永遠在線”,僅此一點,就把藍牙方案摒棄在外,同時,未來汽車對藍牙將另有他用,也不能沖突。
誤區6:車聯網可以解決車輛遠程控制,開關門窗、空調等。用鑰匙鎖門都不確定是否鎖上,還要手拉一下試試,遠程非視覺鎖車/開車、控制門窗等,你能確信是正確操作的嗎?是安全的嗎?是無傷害的嗎?手機還有信號好壞,通斷不連續,這是“鏈路層悖論”(通信學中協議棧設計基礎理論)基本常識都不具備的方案。詳見本系列第1篇提到的只監不控原則。
誤區7:PND屏(WinCE or Android)就是車機。說這是目前一個誤區,是因為大多數人認為車機一定是與CAN連接的,其實大部分是不連接的、或不全連接的,其次,車機OS是Linux和WinCE居多,不適合如今的App(Widget)模式,再者,后裝PND屏等,都需要破線安裝,會導致大量非安全因素。
誤區8:油耗/里程可以從OBD中讀取出來。絕大多數是讀不出來的。車既要具備普適性,是不容易的。
誤區9:智能輔駕、自動駕駛就是車聯網。這些都屬于汽車電子和制造領域,根本不是車聯網范疇。只是用到了汽車聯網和通信。
誤區10:各主機廠都在做自己的車聯網。他們不能做到互聯互通。
誤區11:“遠程診斷”就是車聯網。這是汽車修理工和后服務專業的事,如同人們需要體驗,但不需要擁有診所和醫院一樣,互聯網將顛覆這種模式。主機廠將很快會自動提供這類服務。
誤區12:CAN(OBD)可以給出完整車況。CAN通常只能根據汽車制造時的配置,提供可檢測區間,而不是如理論上可檢測所有動力、底盤、信號、車身等所有系統,因此,是否能給出完整車況,是汽車制造的事,而車聯網關注的是聯網和網絡汽車的屬性。
誤區13:CarPlay、OAA等是車聯網。根據前面闡述和分析說理,讀者可以自己得出結論。其實,無論是CarPlay、CarNet,還是OAA等,他們的主設計師和產品經理們從未定義過這些是車聯網,充其量只是部分,都是媒體和外界皇帝新衣鼓吹者們制造出來的,這些始作俑者們樂得坐觀其變。
最后,我想說車聯網是一個偉大的創新,將顛覆很多互聯網和傳統產業的思維,同時創造出更多的產業與用戶價值,而車聯網創業是要挖掘出“新價值空間”。
 掃一掃
掃一掃
 掃一掃
掃一掃